Aller au contenu
CIVILMANIA
Se connecter
Accueil
medeaing medeaing
CIVILMANIA
Se connecter
Connexion
Adresse de courriel
Mot de passe
Se souvenir de moi
Non recommandé sur les ordinateurs partagés
Connexion
Mot de passe oublié?
Ou connectez-vous avec
Facebook
X (Twitter)
Microsoft
LinkedIn
Google
S’inscrire
Forums
Téléchargements
Blogs
Emploi
Divers
Clubs
Règles
Équipe
Utilisateurs en ligne
Classement
Webinaires
Activité
Toutes les activités
Flux de mon activité
Dernières discussions
Recherche
Nos choix
PRO
Plus
Plus
Forums
Téléchargements
Blogs
Emploi
Divers
Activité
PRO
Recherche...
Accueil
medeaing medeaing
medeaing medeaing
Membres
Inscription
Septembre 7, 2023
1 a
Dernière visite
Avril 6
Avr 6
Afficher le profil
Afficher son activité
Conception d'une structure en béton armé
Conception d'une structure en béton armé
medeaing medeaing
a posté un message dans un sujet dans
Béton armé
Mars 10
Mar 10
1 réponse
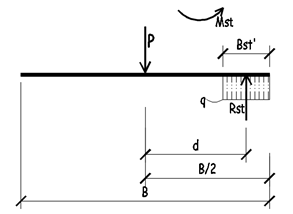
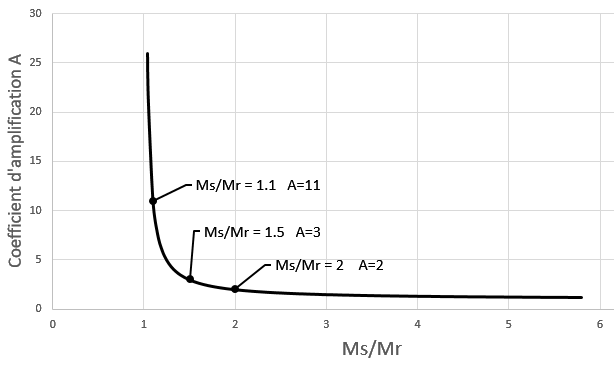
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
medeaing medeaing
a posté un message dans un sujet dans
Géotechnique & fondations
Février 27
Fév 27
11 réponses
fondations
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
medeaing medeaing
a posté un message dans un sujet dans
Géotechnique & fondations
Février 14
Fév 14
11 réponses
2
fondations
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
Stabilité au renversement. Est ce que Ms/Mr >1.5 a encore un intérêt ? D'où vient cette notion ?
medeaing medeaing
a posté un message dans un sujet dans
Géotechnique & fondations
Février 7
Fév 7
11 réponses
1
fondations
effort normal sismique
effort normal sismique
medeaing medeaing
a posté un message dans un sujet dans
Logiciels pour Structures
Novembre 22, 2024
Nov 22
6 réponses
Analyse modale Robot SA : masse modale UY nulle
Analyse modale Robot SA : masse modale UY nulle
medeaing medeaing
a posté un message dans un sujet dans
Logiciels pour Structures
Novembre 15, 2024
Nov 15
4 réponses
Accueil
medeaing medeaing
Toutes les activités
Refresh
Se connecter
S’inscrire
Recherche
0
Votre panier
Menu
Fermer le panneau
Compte
Fermer le panneau
Se connecter
S’inscrire
Fermer le panneau
Navigation
Fermer le panneau
Forums
Téléchargements
Blogs
Emploi
Divers
Clubs
Règles
Équipe
Utilisateurs en ligne
Classement
Webinaires
Activité
Toutes les activités
Flux de mon activité
Dernières discussions
Recherche
Nos choix
PRO
Accueil
medeaing medeaing
Fermer le panneau
Recherche
Fermer le panneau
Recherche
Où:
Partout
Sujets
Fichiers
Évènements
Produits
Pages
Offres d'emploi
Vidéos
Billets
Membres
Recherche:
Titres et corps des contenus
Titres des contenus uniquement
Date de création:
N’importe quelle date
Les dernières 24 heures
La semaine passée
Le mois dernier
Les six derniers mois
L’année passée
Utiliser:
Tous ces mots
L'un de ces mots
Dernière mise à jour:
N’importe quelle date
Les dernières 24 heures
La semaine passée
Le mois dernier
Les six derniers mois
L’année passée
Recherche
Partout
Sujets
Fichiers
Évènements
Produits
Pages
Offres d'emploi
Vidéos
Billets
Membres
Trouver des résultats dans
Rechercher dans les titres et le contenu
Rechercher uniquement dans les titres
Date de création
Créé à tout moment
Créé au cours des 24 dernières heures
Créé la semaine passée
Créé le mois passé
Créé au cours des 6 derniers mois
Créé l'année passée
Dernière mise à jour
Mis à jour à tout moment
Mis à jour au cours des dernières 24 heures
Mis à jour la semaine dernière
Mis à jour le mois dernier
Mis à jour les 6 derniers mois
Mis à jour l'année dernière