Accédez à toutes les fonctionnalités premium et rejoignez les membres PRO :
✅ Accès total aux rubriques
✅ Téléchargements illimités
✅ Expérience sans publicité
✅ Veille actus, et tendances
✅ Veille offres d'emploi
✅ Veille conférences
✅ Stockage augmenté
✅ Badge PRO
✅ Messages privés et plus !
Abonnez-vous à partir de5€ par mois !









comment_94365Bonjour,
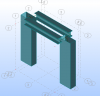
Je veux bien modéliser des poteaux avec des corbeaux sur les quelles reposerai deux entretoises sur des appui néoprènes, il s'agit d'une passerelle bi-poutres métalliques avec poteau en BA
Selon vous c'est quoi la modélisation correcte sur robot ?
Ci joint une image descriptif du problème
Merci