



- Réponses 17
- Vues 4.4k
- Créé
- Dernière réponse
Meilleurs contributeurs dans ce sujet
-
 AITELHADJ Farid 6 messages
AITELHADJ Farid 6 messages -
 khaledphys 4 messages
khaledphys 4 messages -
 ahmed elb 4 messages
ahmed elb 4 messages -
 abdeslam-brahim 1 message
abdeslam-brahim 1 message
Jours populaires
Messages populaires
-
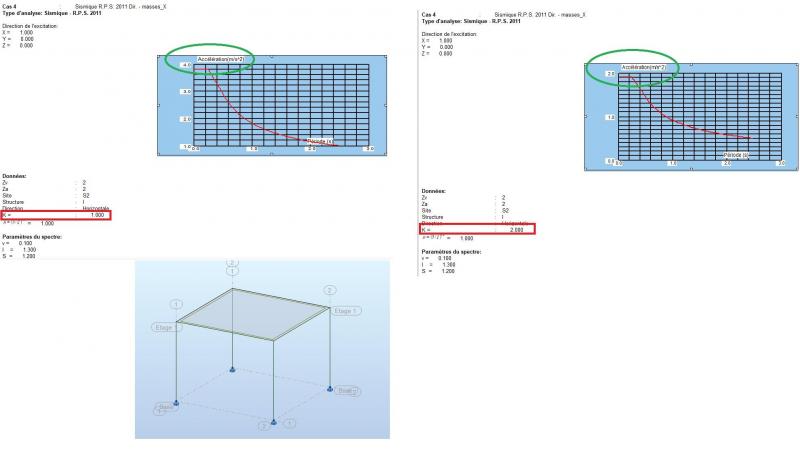
bonjour faire attention !!! ROBOT BAT multiplie automatiquement les déplacements par le coefficient K ou R cordialement
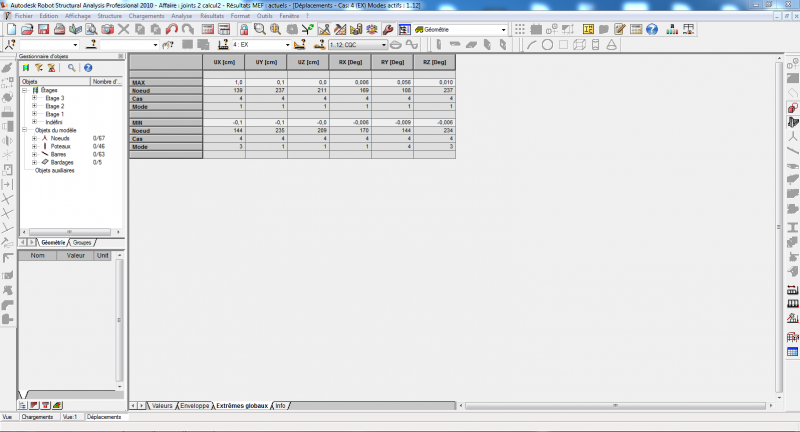
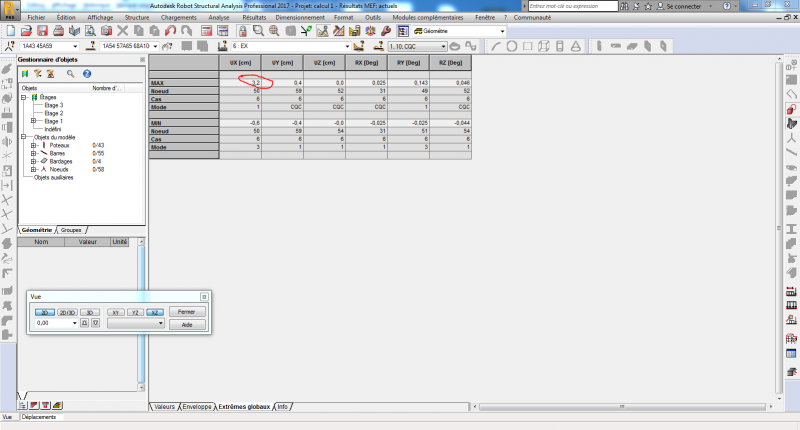
comment_129961Salut mes cher amis , j'ai trouvais une grande différence dans les résultats de déplacement entre la version 2010 ( ux = 1 cm et dans la version 2017 (ux=3.5cm ) !!! J'ai modélisé la mémé structure , méme combinaisons , unités... , aide moi SVP et merci.