



- Réponses 14
- Vues 3k
- Créé
- Dernière réponse
Meilleurs contributeurs dans ce sujet




Jours populaires
Messages populaires
-
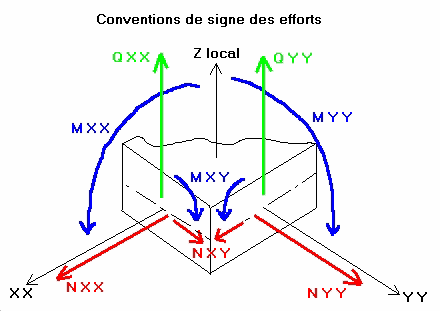
Non pour les dalles ce n’est pas la même convention. Mxx est le moment parallèle à l’axe x (c’est-à-dire autour de l’axe Y) et Myy est le moment parallèle à l’axe y (c’est-à-dire autour de l’axe x).
-
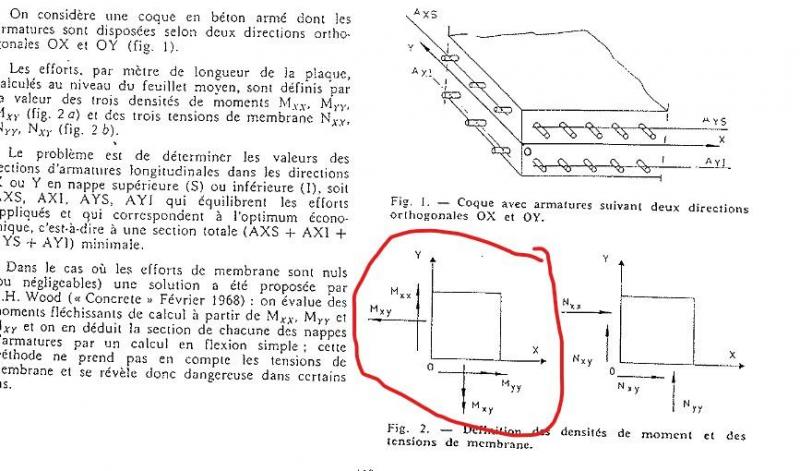
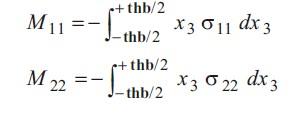
Ce n’est pas la même analogie des poutres car les moments dans une dalle pour une direction donnée représente l’intégration des contraintes parallèle à cette direction (voir formule ci-dessous extrai
-
Bonjours, Oui je suis d’accord avec vous '‘tous les logiciels n'ont pas la même convention’’ mais d’une manière générale (indépendamment du logiciel utilisé) une formulation basée sur la théorie
comment_149733Bonjour,
Je veux savoir comment par exemple en fonction de la sollicitation selon tel axe alors on a un moment selon tel axe ?
Par exemple convention des axes comme sur robot, comment peut-on avoir un moment prépondérant selon x ? Cela veut dire qu'on a une charge selon z ?