



- Réponses 5
- Vues 3.6k
- Créé
- Dernière réponse
Meilleurs contributeurs dans ce sujet
-
 Tony_Contest 2 messages
Tony_Contest 2 messages -
 bansan 1 message
bansan 1 message -
 kmer18 1 message
kmer18 1 message -
 Exym 1 message
Exym 1 message
Jours populaires
Messages populaires
-
Bonjour, Les instabilités type 1 et 2 dans robot conduisent à des résultats erronés. Les instabilités de type 3 sont liées à des valeurs très éloignées les unes des autres lors de diagonalis
-
Bonjour, En évitant d'avoir des rigidités très différentes pour les éléments, c'est à dire des éléments très courts. Pour les modèles à barres : éviter d'avoir des noeuds très proches les un
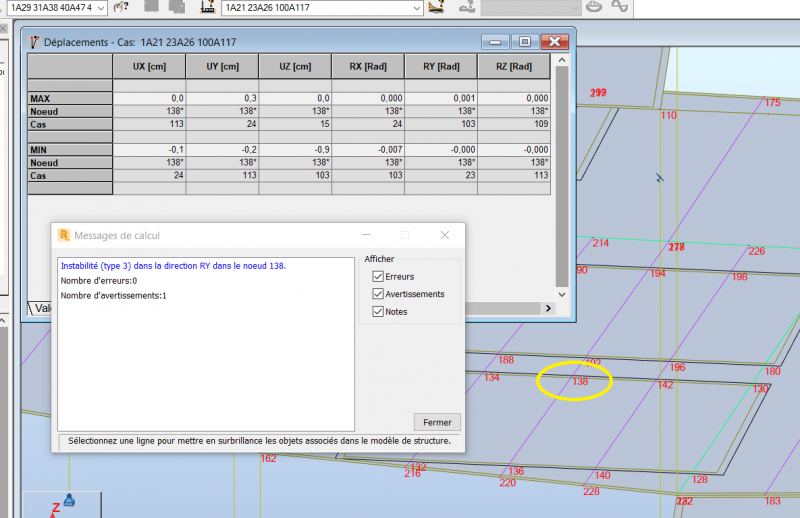
comment_150475Bonjour,
Je modélise une passerelle métallique avec ROBOT.
Lorsque je lance le calcul j'ai une instabilité Ry de type 3 qui apparait sur un nœud de calcul (nœud fictif crée par robot pour faire le calcul).
Lorsque je regarde le déplacement de ce nœud en Ry, il est faible, voire nul.
J'aimerai avoir votre avis
Merci