



- Replies 12
- Views 2.6k
- Created
- Last Reply
Top Posters In This Topic
-
 Struc2000 5 posts
Struc2000 5 posts -
 Tony_Contest 4 posts
Tony_Contest 4 posts -
 medeaing 2 posts
medeaing 2 posts -
 BELLAMINE 1 post
BELLAMINE 1 post
Most Popular Posts
-
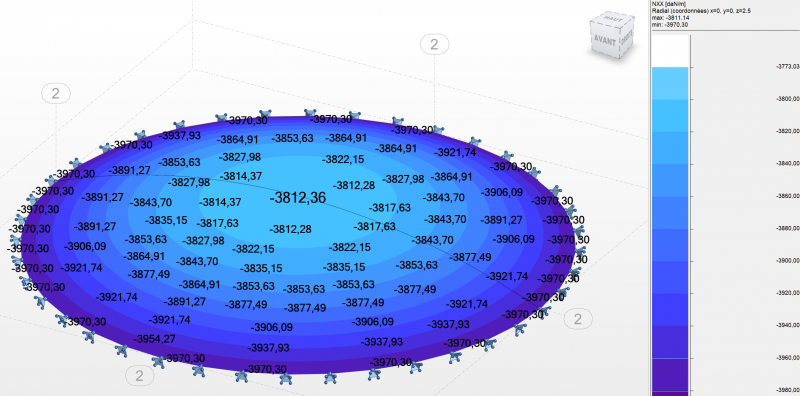
Assalamo alykom wa rahmato allah wa barakatoho Les formules de Nphi et Nteta que vous avez présenté se découlent de ‘’la théorie de membrane’’ dont le principe fondamentale est ‘’le transf
-
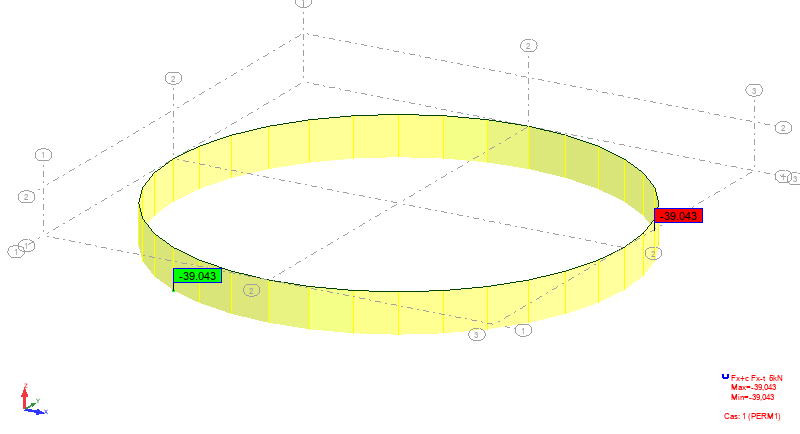
Bonjour, Bravo à @medeaing. Il faudrait un tag "Bravo" en plus du cœur. Pour avoir le bon angle il faut orienter l'appui avec un point se trouvant à 0,0,2.5 :Coupole-indA Model.pdf Il f
-
Assalamo alaykom wa rahmato ALLAHI wa barakatoho Sauf erreur de ma part, un signe (-) doit indiquer un effort de compression ?! (C’est la convention pour le SAP2000. Pour le robot je ne suis pas
comment_151377En essayant d'analyser une coupole sphérique sur robot SA, je trouve les résultats suivant :
Données :
rayon : 6m
flèche : 1.2 m
Rayon de courbure : 15.6 m
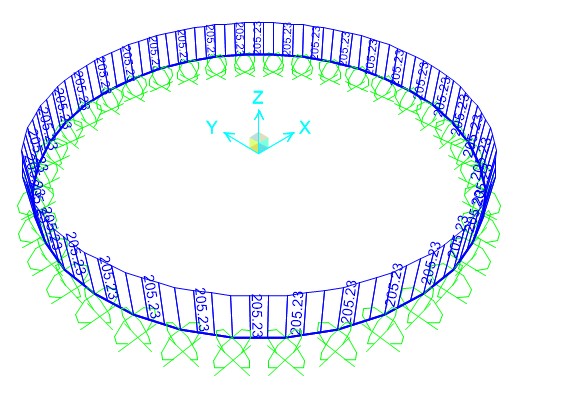
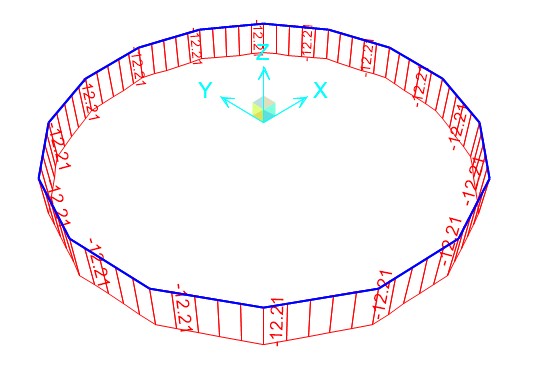
résultats de robot sous l'action du poids propre seul :
sachant qu'avec le calcul manuel :
le Nphi (Nyy sur robot) est max aux bords inférieur de la coupole et vaut : -40.56 kN.
la question : pourquoi cette différence entre les résultats manuels est ceux fournis par le logiciel ? est ce qu'il y a une erreur quelque part dans la modélisation ? et merci