Accédez à toutes les fonctionnalités premium et rejoignez les membres PRO :
✅ Accès total aux rubriques
✅ Téléchargements illimités
✅ Expérience sans publicité
✅ Veille actus, et tendances
✅ Veille offres d'emploi
✅ Veille conférences
✅ Stockage augmenté
✅ Badge PRO
✅ Messages privés et plus !
Abonnez-vous à partir de5€ par mois !




comment_187979Bonjour,
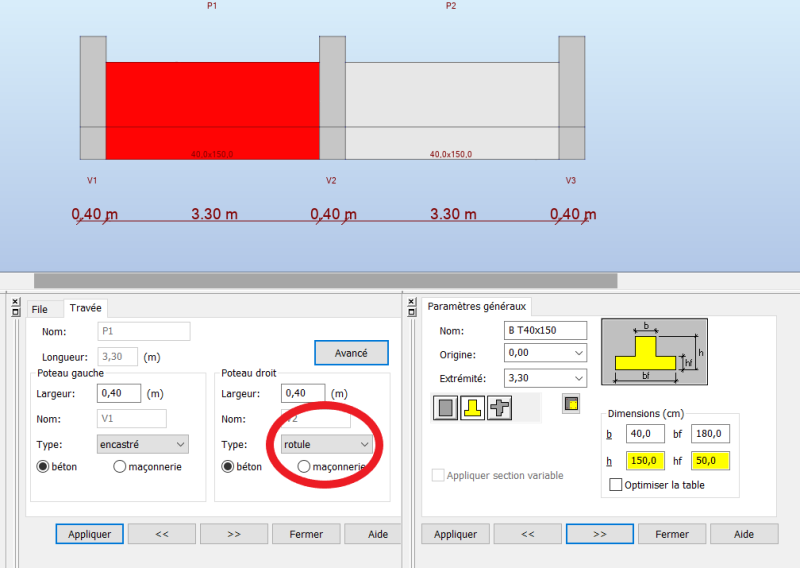
je veux calculer sur robot une semelle filante sous poteaux, cette dernière est soumise a des forces et des moments concentrés ainsi que des moments de torsion.
Le problème c est que quand je rajoute une travée, le logiciel change le type d appui: encastré en rotule, et quand je lance le calcul une erreur s affiche disant que tous les appuis ont été définis comme rotule.